
Strain-Gauge vs. Magnetostrictive Torque Sensors
Torque sensors are generally accepted as the norm for good e-bikes. But what technology is best for making a torque sensor? The two main contenders are based on either strain gauges or the magnetostrictive principle (also sometimes called magnetoelastic). For an overview of other technologies, please see the technology comparison overview.
In this deep dive, we look at some of the key differences between the two methods. Even though it has a focus on e-bikes, it is equally valid for all other applications of torque sensor technologies. For e-bikes, it makes sense to start out by looking at the two main points raised by a veteran in e-bikes, who has been working with e-bike conversions, motors, DIY, tinkering, simulating, motor design, etc. since before 2005:
Justin (CEO, founder, GRIN Technologies, ebikes.ca)
As there are obviously advantages to both technologies, the list of topics to look at is a bit longer:
- Hysteresis (also sometimes called residual torque)
- Sensitivity to stray magnetic fields
- Angle Dependent Error (also sometimes referred to as RSN, Rotational Signal Non-uniformity, or RSU Rotational Signal Uniformity)
- Linearity
- Temperature offset drift
- Simplicity
- Ruggedness
- Power consumption
- Torque-sensing metal shapes
We use the SG3Q technology as an example of what is possible with a strain gauge sensor. We use Vendor “M” data for the magnetostrictive sensor as shown in this datasheet extract:
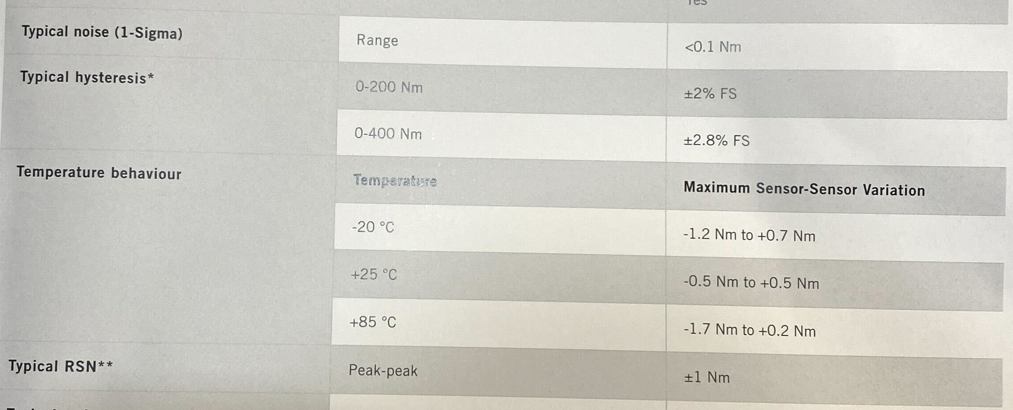
The stars refer to these notes:

Why Zero-Offset is Important
The e-bike applications are a bit special in that some torque values are more important than others. A lot of the ebike ride feeling is defined at low torque levels, around when pedaling is starting, and during relaxed cruise speed with higher cadence but low torque.
The main contributors to offset are: Hysterisis, angle-dependent offset, and temperature offset. These offsets are added together to form the total worst-case offset. The e-bike controller is typically configured to discard any value of input torque below this total offset level in order to avoid unsafe behavior. The bigger this “dead band” is, the less responsive the ebike will be in those crucial low-torque situations. Like starting, stopping, maneuvering obstacles, etc.
Each source of potential offset thus directly impacts the safety and quality of ride feel one can achieve.
Hysteresis or “Residual Torque”
Hysteresis is the technical term for memory effect or lagging effect. Like that known from the memory foam in a bed pillow. You press it down and it takes the shape of your head, but when you lift your head it stays in that shape and only slowly (if ever) returns to its normal shape. Hysteresis can also be seen as a “direction memory”. Every time the forces change direction it needs a little extra to overcome the change.
You may be able to feel the hysteresis effect on an e-bike torque sensor. One way to provoke this is by pushing very hard on the pedals and then switching to just “ghost pedaling” with almost zero torque. On e-bikes with a lot of hysteresis in the torque sensor, the motor may provide more assistance than expected during the “ghost-pedaling” part in this scenario. This is clearly an unusual way of pedaling but illustrates the mechanism. In normal use of the e-bike, the effect may not be as prominent for the user. But is still there and contributes to a less natural feel of the bike.
It is possible to use software to mitigate some of the hysteresis effects. This is typically done through an auto-zero function that tries to detect when the torque should be zero and then adjust the sensor zero-point accordingly. In comparing the two technologies it is preferable to disable any software mitigation to have an apples-to-apples comparison as the same tricks can be applied to artificially improve any measurement method. Unfortunately for this comparison, we can only look at the specs from one sensor (with unknown “signal doctoring” applied) and the strain gauge torque sensor raw output.
Magnetostrictive
If we look at hysteresis for magnetostrictive sensors, an example is this one where the spec sheet shows +/-2-2.8% of full-scale. The asterisk adds a lot of further limitations including the exact metal used, the treatment, and that this specification is for 25C only.
With a typical e-bike application requiring torque measurements up to 2-300 Nm, we can use the lower value of +/-2% FS. This is equivalent to +/-4Nm of hysteresis. How much software auto-zero is involved in achieving this value is unclear.
Strain Gauge
With strain gauge sensors like the one from Sensitivus, the hysteresis mainly comes from the bonding of the strain gauge. The type of bonding recommended by strain gauge manufacturers, bonding services, and Sensitivus achieves better than +/-0.5 Nm.
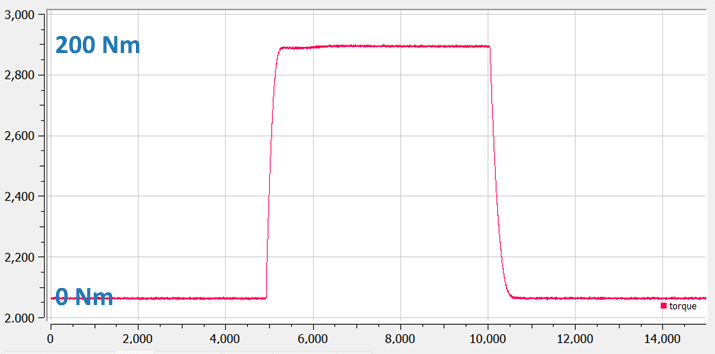
The illustration above shows an example SG3Q strain gauge sensor custom-made for a US customer. By applying a step load of 200 Nm for 5 seconds and looking at how well the torque reading returns to the same value (zero-point) you see that the hysteresis of this sensor is very close to zero (better than +/-0.1 Nm in this test). No software auto-zero was applied in this test. Note that the speed of change in the torque output value is due to the test setup. The sensor response is much faster.
Hysteresis Comparison
Sensitivity to Stray Magnetic Fields
E-bike motors contain a lot of magnetic fields as that is how they operate. Unfortunately, magnetostrictive sensors are using very tiny changes in magnetic fields to perform their function. This creates an inherent risk that the motor itself creates a problem for the sensing. To better understand the challenge, consider the field strengths measured by a magnetostrictive sensor are below 10 mTesla and the typical mid-drive motor will have fields at least 150-200 times higher just 3-5 cm away from the sensor.
In comparison, there are no mechanisms in sensors based on strain gauges that are sensitive to magnetic fields.
On an e-bike, the user may (or may not) experience any consequences of this sensitivity that can be critical in some driving situations. This is something most bike mechanics may not even fully understand and in many cases simply call a defective sensor. There are stories in the e-bike industry of whole warehouses of e-bikes that needed to be passed through degaussing loops in order to get the magnetostrictive sensors to “work again”. This is obviously just anecdotical and should not count for engineering decisions.
Stray Field Sensitivity Comparison
Angle Dependent Error (RSN)
For a rotating torque sensor, it is important that the output value does not vary with the rotation of the metal (shaft) where the sensor sits. The deviation from this is often referred to as RSN. On an e-bike, this is simply an error on top of the other errors from the sensor, as torque sensing at all crank angles is important.
The below plot shows how the torque changes with the crank angle in a well-controlled indoor setup. This rider uses clipless pedals, which is uncommon for e-bikes, but you get the idea.
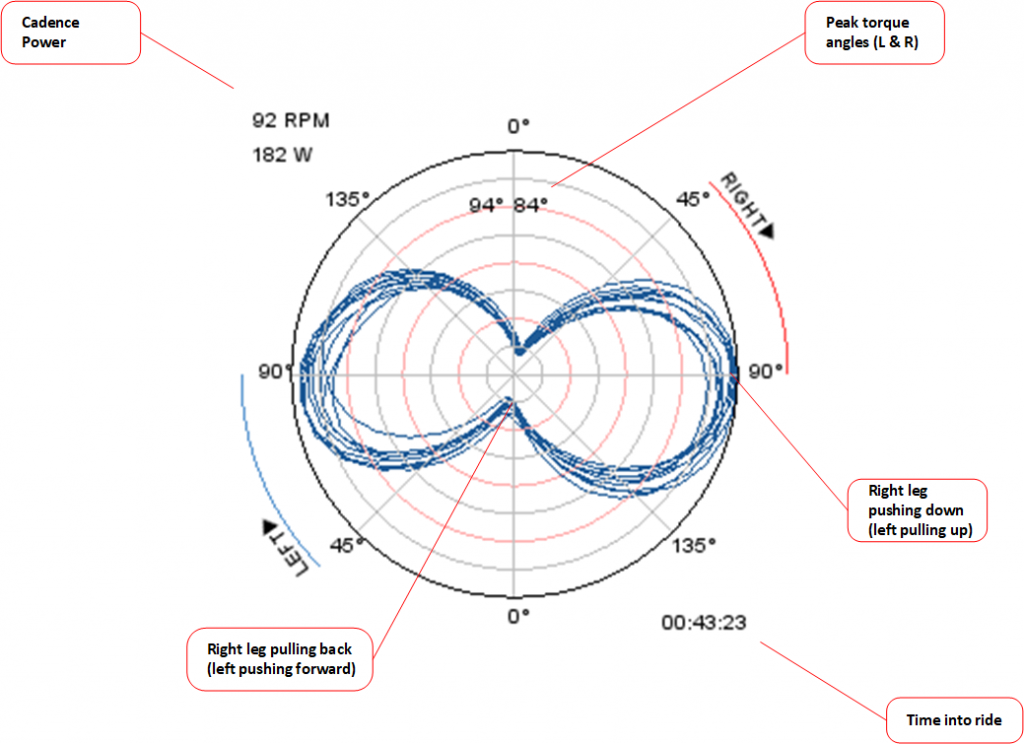
In the peanut-shaped plot, any RSN would move the sensor output toward the center at some crank angles and away from the center at other crank angles. The effect of this may be minimal while riding. However, it really kicks in when not pedaling and adds on top of the other offset errors. Some e-bike torque sensors do not rotate 1:1 with the crank due to clutch, gearing, etc., in which cases any RSN is really just noise.
Magnetostrictive
Magnetostrictive sensors have varying offsets depending on the relative angle between the magnetostrictive torque metal and the stationary sensor coils. This is a fundamental limitation of magnetostrictive sensors, stemming from the inherent variability of the torque metal magnetic properties.
Looking at the data from Vendor “M” the +/-1 Nm offset variation after applying factory calibration using an add-on absolute angle sense disc, that must be installed together with the sensor.
The +/-1 Nm variation (which is really good for a magnetostrictive sensor) will mean that a higher minimum threshold for the torque sensor value must be used. This results in less natural pedal assist. Keep in mind that this offset variation must be added with all other offset effects.
A strain gauge based torque sensor inherently has no such angle-dependent offset. This is simply due to the fact that the measurement device rotates with the shaft.
In this example sensor, the error due to RSN is +/-1 Nm typical.
Strain Gauge
There is nothing in the strain gauge sensor method that creates any angle-dependent output provided the metal where the strain gauge is mounted is correctly designed to have strain proportional to torque (and nothing else). The fact that the measurement device rotates with the shaft ensures that the angle relative to the stationary parts is not an issue.
RSN Comparison
Temperature Offset Drift
Sensor output drift with temperature is one of the difficult things for all torque sensors. The metal movements measured are so tiny that the expansion and compression of the metal itself change significantly. Simply due to temperature changes. When combining metals with different temperature coefficients (TC) it can even get non-linear or have other complex effects. Here we are looking at the pure case of unconstrained torque-sensing metal.
Magnetostrictive
Looking at the data material from vendor “M” for the magnetostrictive sensor, the variation in output when going from -20C to +85C is listed as -1.7 Nm to +0.7 Nm or a total change of 2.4 Nm for this temperature variation. This includes full active temperature compensation, which should really be disabled for a fair 1:1 comparison.
Strain Gauge
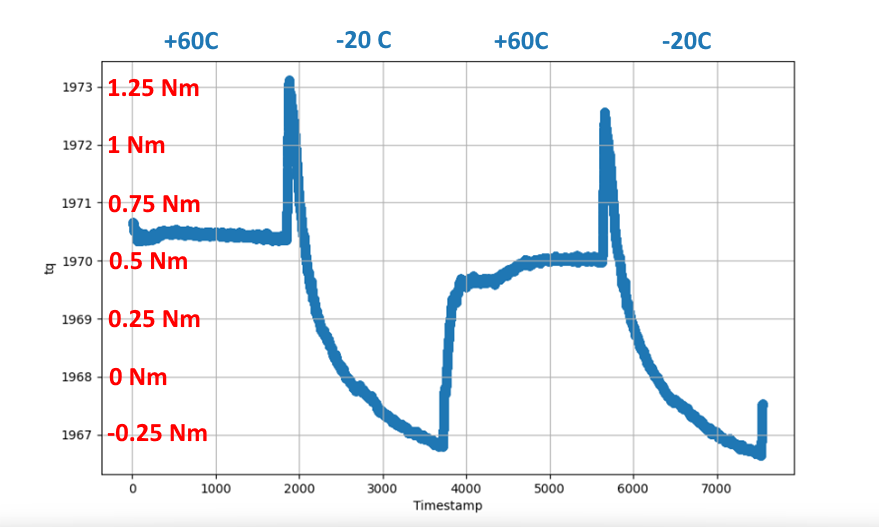
With the SG3Q strain gauge torque sensor, the plot below shows a simple test where the sensor was moved directly between hot and cold for 30 minutes at each temperature (-20C and +60C). This is a harsh test as the quick transition creates temperature gradients that we would not see in most applications. This shows up as short transients on the plot below.
Temperature Offset Comparison
The SG3Q test of just one sensor. This is not 1:1 comparable to the data shown for the magnetostrictive sensor. But it should be clear that the strain gauge torque sensor without any temperature compensation is at least as good as the magnetostrictive sensor with full temperature compensation.
= 1.5 Nm
= 2.4 Nm (typical)
Simplicity, Ruggedness, and Reliability
A simpler sensor will typically be more reliable as there are fewer things that can go bad over time. However, there are things that can change over time – like the strength of a magnet. When used in a sensor, they are more problematic than things that are known to stay pretty much unchanged. For torque sensors on ebikes, vibrations, chocks, temperature cycles, humidity (and water), oil/grease, dust/particles, etc. are important environmental challenges to consider.
A fully custom sensor can be protected exactly as required by the environment it is designed to operate in. Of the two technologies compared here, the main weak spots are:
- Changes in magnetization over time – Magnetostrictive
- Weakening of glue bond over time – Strain gauge
The first of the two is almost guaranteed to happen. The second is well understood and lifespans of 20+ years are commonly achieved in the industry.
The key advantage of the magnetostrictive principle is that the rotating part can be passive. But it needs to be carefully prepared and magnetically treated. This is a simpler mechanical design. However, as the electronics on the rotating part of a strain gauge based torque sensor get integrated into a small chip, this advantage goes away.
Power Consumption
Just comparing power consumption between sensors is not all. There may be advantages in accuracy and resolution that one sensor achieves by increased power consumption. So this needs to be a part of the overall picture.
Lower power consumption helps improve battery life. If sufficiently low it allows the sensor to be on for longer while the bike is stand-by and ready to use without draining the battery.
Total Offset Error Comparison
When looking at a fairly realistic torque range of 0-200Nm and calculating the total offset from the sources found above, we can get a reasonable comparison of the total offset error. Simply summing all the offset sources like hysteresis, angle-dependent error (or RSN), and temperature sensitivity. This adds up as shown when compared to the SG3Q strain gauge based torque sensor technology:
It should be noted that all active offset compensation was turned off for the strain gauge sensor and was active for the magnetostrictive sensor. Including an extra angle sensing disc that helps get the angle-dependent offset error down in a reasonable range for the magnetostrictive sensor.
Similar compensation “tricks” could be added to the strain gauge sensor if even better performance were needed.
Final notes: In this overview, we have been striving to be as objective as possible and refer to actual data material made available from specific vendors – including our own material. This comparison intends to pass the test for legal marketing in Denmark where the requirements for this are very strict. We do not call out the names of the specific magnetostrictive sensor vendors here, but we obviously have those references.
FAQ
EU regulation requires an e-bike to only provide assistance when the crank is turning. The cadence sensor typically satisfies this requirement. An angle sensor is even better and combined with a torque sensor makes for an excellent system.
 SENSITIVUS GAUGE
SENSITIVUS GAUGE